一. 程序 链接到标题
源码:https://github.com/eriksandstroem/Point-SLAM
根据pytorch和cuda toolkit版本,要求ubuntu为20.04
二. 问题 链接到标题
程序内无可视化界面,但可通过wandb可视化。
三. 测试 链接到标题
- 完善dockerfile
RUN apt-get update && apt-get install -y vim # 安装vim
RUN pip install wandb # 安装wandb
- 运行容器并挂载数据集
docker run -v /home/heirenlop/workspace/Dataset/Point-SLAM/Replica:/point-slam/datasets/Replica -it --gpus all point-slam:latest
- 修改参数 修改 configs/point_slam.yaml
wandb : false -> true
wandb_folder : "old path" -> "new path""
- 运行程序
python run.py configs/Replica/room0.yaml
- 输出
以Replica的wandb 日志为例

(1) 参数
| 图表名称 | 横坐标单位 | 纵坐标单位 |
|---|---|---|
color_loss_tracker | Step(步数,无单位) | Loss(无单位) |
color_loss_pixel | Step(步数,无单位) | Loss per Pixel(无单位) |
num_joint_iters | Step(步数,无单位) | Iterations(次数) |
pts_total | Step(步数,无单位) | Points Count(个) |
camera_quad_error | Step(步数,无单位) | Quaternion Error(无单位) |
time | Step(步数,无单位) | Time per Frame(秒) |
(2) color_loss_tracker 指标意义:这是 Point-SLAM 中颜色损失的跟踪器,用于评估在 SLAM 系统中对颜色信息的预测误差。 变化趋势: 起初损失较低,随后略有上升。 可能的原因:随着更多帧的处理,系统可能开始尝试拟合更复杂的颜色分布,导致损失增加。
(3) color_loss_pixel 指标意义:评估单个像素的颜色损失,用于衡量系统对颜色信息的拟合程度。 变化趋势: 开始时损失较高,随后迅速下降,最后趋于平稳。 可能的解释: 起初系统对数据的拟合较差,随着优化进行,系统逐渐拟合数据。
(4) num_joint_iters 指标意义:每一帧中优化过程所需的迭代次数。 变化趋势: 开始时迭代次数很高,随后迅速下降并稳定在较低值。 可能的解释: 系统在初期需要更多迭代来调整参数,随着优化的收敛,迭代次数减少。
(5) pts_total 蓝色曲线,来自 mapper_20250102_090445。 指标意义:SLAM 系统中总点数的累积数量。 变化趋势: 曲线呈现线性增长,表明系统持续添加新的点到地图中。 可能的解释: 系统每处理一帧,会提取新的点云信息。
(6) camera_quad_error 指标意义:SLAM 中相机姿态(四元数)估计的误差。 变化趋势: 曲线在整个运行过程中有较大的波动。 可能的解释: 不同帧的姿态估计可能受到噪声或数据分布变化的影响。
(7) time 指标意义:每帧的处理时间。 变化趋势: 时间逐渐上升,表明处理复杂性随着时间增加。 可能的解释: 随着点云数量增加,每帧需要处理的数据更多,导致耗时增加。
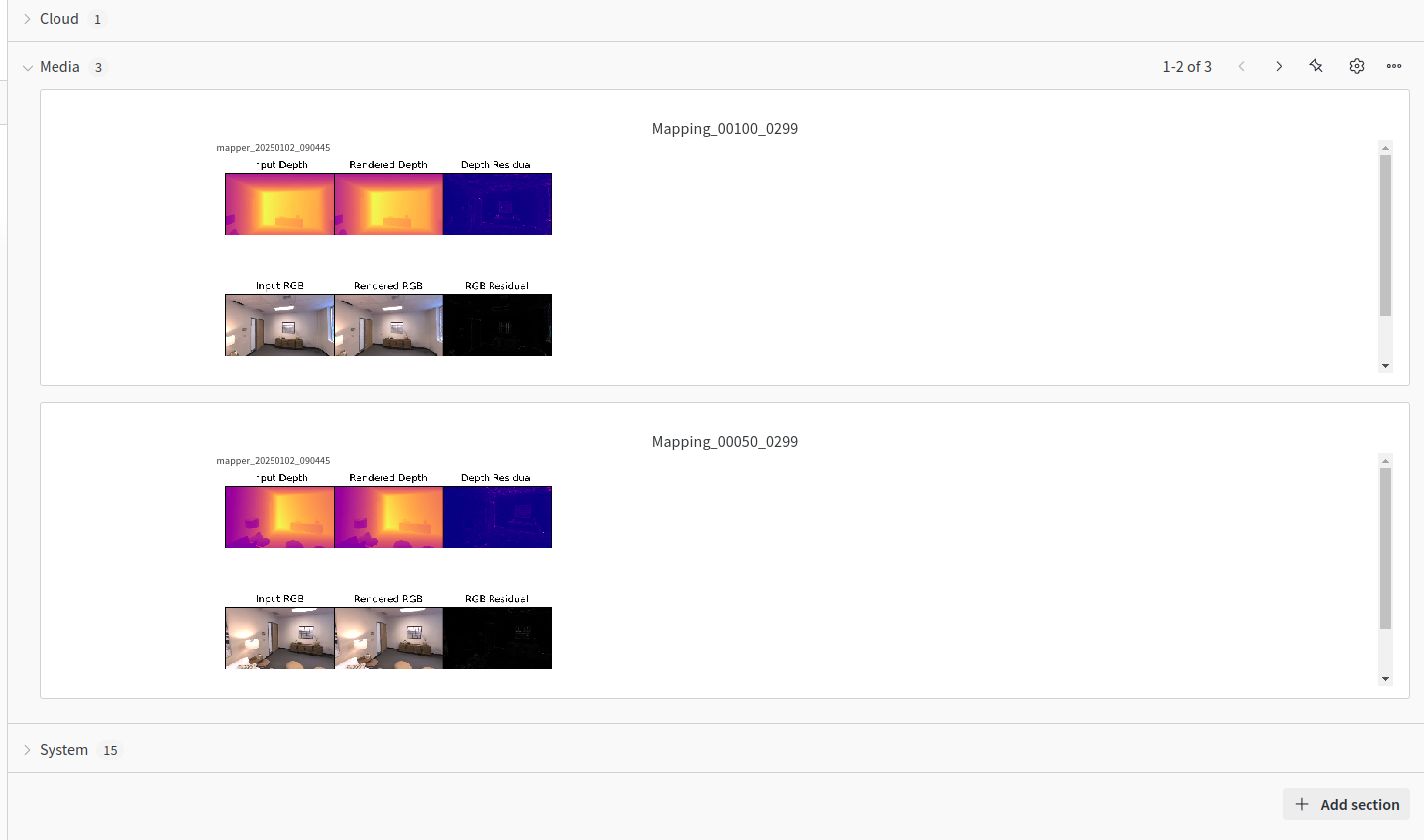
(1) Mapping_00100_0299 和 Mapping_00050_0299 这是两个不同的时间点或关键帧的结果。
(2) 第一行:深度图的可视化
a. Input Depth: 表示 SLAM 系统输入的深度图(真实深度)。 通常是由深度相机获取或 Ground Truth 提供的深度信息。 颜色编码:深色(蓝色)表示近距离,亮色(黄色/红色)表示远距离。
b. Rendered Depth: 表示由 SLAM 系统生成或预测的深度图。 通过渲染模型输出的深度估计。
c. Depth Residual: 表示输入深度图与生成深度图间的误差(残差)。 颜色越亮,表示误差越大;颜色接近黑色,表示误差接近零。
作用:用于评估 SLAM 系统在深度信息上的拟合效果。
(3) 第二行:RGB图的可视化
a. Input RGB: 表示 SLAM 系统输入的 RGB 图像(原始图像)。 通常是相机采集的真实场景图像。
b. Rendered RGB: 表示 SLAM 系统根据场景建模生成的 RGB 图像。 通过系统的渲染和颜色估计模块生成。
c. RGB Residual: 表示输入 RGB 图像与生成 RGB 图像之间的误差(残差)。 通常是基于像素的差异显示,颜色越亮表示误差越大。

(1) geo_loss_pixel 纵坐标:几何误差,通常表示每个像素的几何损失。 趋势: 初期模型拟合场景时,误差快速下降。 后期场景复杂性增加,几何拟合受到更多挑战。 观察意义:几何误差的下降和波动情况可以用来评估优化效果。
(2) idx_map 纵坐标(Map Index):当前地图中的关键帧或地图块索引。 趋势: 曲线呈现线性增长,表明地图中的索引在每帧都在增加。 观察意义:反映系统地图构建过程的动态变化。